圆形限制性三体问题
本文作者:天疆说
校对记录:
- 2026年4月29日:纠正圆形限制性三体问题词条中的公式错误和参考文献引用错误
定义
圆型限制性三体问题模型(Circular Restricted Three-Body Problem,CRTBP)是深空探测中最基本的动力学模型之一,也是最常用的模型,描述了一个质量可忽略的小天体在两大天体引力作用下的运动状态。假设两大天体为质点,围绕二者的共同质心做圆周运动。在地月空间中,两大天体即为地球和月球。该模型可以有效地研究平动点附近动力学特性与相空间结构。
坐标系与归一化
CRTBP 通常在地月会合坐标系(地月质心旋转坐标系)中研究。以两个主天体 (地球)和 (月球)的公共质心为坐标原点 , 指向 的延长线为 轴, 轴与 轴垂直,构成右手坐标系。
为方便计算,引入无量纲化处理:
- 特征质量
- 特征长度 (地月平均距离)
- 特征时间
质量参数定义为 ,其中 。
归一化单位(CR3BP 典型单位制)
CR3BP 中常采用一套归一化单位(Canonical Units),使得问题求解与数值传播更为简洁:
| 符号 | 名称 | 定义 | 地月系统 SI 值 | 日地系统 SI 值 |
|---|---|---|---|---|
| 质量单位 | (两主天体质量之和) | kg | kg | |
| 距离单位 | 两主天体之间的距离 | km | km | |
| 时间单位 | ,使得两主天体平均运动 | s | s |
归一化后,CR3BP 的引力参数 \GM_1 = 1 - \mu、\GM_2 = \mu,两主天体绕公共质心的公转角速度 ,轨道周期 TU。在这套单位制下,轨道周期、稳定性分析等量均以归一化单位表示,便于不同系统间的轨道特性对比。
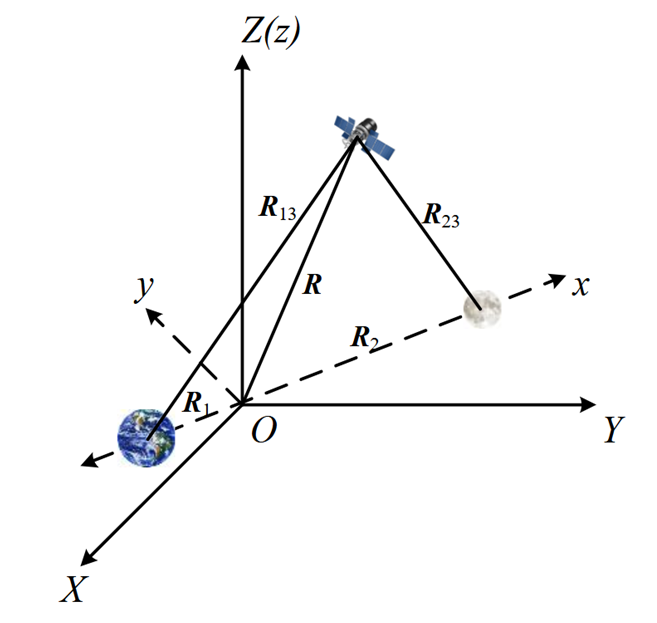
地月会合坐标系:以两个主天体的公共质心为原点,x轴沿 P₁→P₂ 方向,z轴垂直于地月轨道平面
动力学方程
在归一化后的质心旋转坐标系下,CRTBP 的动力学方程为:
其中:
方程中 和 为科里奥利力项, 和 项为离心力项。
Jacobi 常数与零速度曲面
1836 年,Jacobi 发现 CRTBP 在旋转坐标系下存在一个能量积分(Jacobi 常数 ),是 CRTBP 中唯一存在的积分常数:
其中 ,有效势函数为:
令速度 ,可得曲面方程 ,即零速度曲面。零速度曲面的结构随 Jacobi 常数 的变化而变化:
| Jacobi 常数范围 | 探测器运动区域 |
|---|---|
| 只能在两个主天体各自附近运动 | |
| 可经 实现两天体附近空间的转移 | |
| 可经 点进入外部空间 | |
| 可从 点进入外部空间 |
Jacobi 常数和零速度曲面是描述三体系统内轨道运动的重要指标,也是任务可行性分析的基本工具。
轨道生成:打靶法与微分修正
在 CR3BP 模型中,晕轨道、Halo 轨道等三维周期轨道的初始条件无法解析给出,需要借助打靶法(Shooting Method)和微分修正(Differential Correction)进行数值求解。
基本原理
打靶法的核心思想是将两点边值问题(Two-Point Boundary Value Problem, TPBVP)转化为初值问题的迭代求解:
- 在某个参考流形(如 平面)上选取初始猜测状态
- 积分轨道至周期约束截面(如同 平面再次穿越点)
- 计算状态偏差,通过线性化(状态转移矩阵 STM)修正初始猜测
- 迭代直至周期条件满足
微分修正算法
设轨道半周期积分后状态偏差为 ,利用状态转移矩阵 线性化:
通过对 的选择使 在指定方向上归零,逐步收敛至满足周期条件的轨道。
延拓法(Continuation)
单一打靶往往难以收敛,需配合弧长延拓法(Arc-length Continuation)逐步接近目标振幅。典型步骤:
- 从已知周期解(如 的平面 Lyapunov 轨道)出发
- 逐步增大 振幅,每步以打靶-修正求解新轨道
- 在参数空间中将解链延续至目标 值
不同轨道族的打靶条件
| 轨道族 | 对称性 | 打靶截面 | 自由变量 |
|---|---|---|---|
| DRO | 关于 轴对称 | 轴穿越点 | ,周期 |
| Halo / NRHO | 关于 平面镜像对称 | 平面穿越点 | , |
Zimovan (2017) 在 Purdue 大学的博士论文中系统总结了地月 L1/L2 NRHO 的单次打靶与多步打靶求解策略,是晕轨道初始条件生成的标准参考文献。
核心要素
数学定义
CR3BP 在地月会合坐标系下的动力学方程包含引力项、科里奥利力项和离心力项,质量参数 描述系统的质量分布。归一化后引力参数 、,公转角速度 。
关键性质
CR3BP 存在五个平动点(三个共线、两个三角),Jacobi 常数 是唯一守恒量。零速度曲面的拓扑结构随 值变化,限制了航天器的可达区域。
数值方法
周期轨道的初始条件通过打靶法和微分修正进行数值求解,配合弧长延续法逐步接近目标振幅。轨道族的系统化计算采用延拓方法。
应用价值
CR3BP 是地月空间轨道设计的基础模型,可有效研究平动点附近的动力学特性与相空间结构。DRO、NRHO、Halo 等重要轨道族均在 CR3BP 框架下发现和分析,为月球门户等深空任务提供了理论基础。
相关概念
- 平面圆形限制性三体问题模型(Planar CRTBP)
- 空间圆形限制性三体问题模型(Spatial CRTBP)
- 椭圆限制性三体问题模型(ERTBP)
- 平面椭圆限制性三体问题模型
- 空间椭圆限制性三体问题模型
- Hill 三体问题(HTBP):CRTBP 的特殊情况,坐标中心移至较小主天体
- 拟双圆四体问题(QBCP):在 CRTBP 基础上引入太阳摄动的自洽模型
- Birkhoff-Gustavson 标准型:平动点邻域哈密顿量的正则变换与标准化方法
- 中心流形(Central Manifold):平动点邻域相空间分解中的中心方向不变流形
- 作用角变量(Action-Angle Variables):可积哈密顿系统的标准正则坐标
- Poincaré 截面(Poincaré Section):高维相空间降维可视化工具
- 轨道辨识(Orbit Identification):基于特征参数的平动点轨道识别方法
参考文献
[1] Qiao C, Long X, Yang L, et al. Orbital parameter characterization and objects cataloging for Earth-moon collinear libration points[J]. Chinese Journal of Aeronautics, 2025: 103869-103896.
[2] Klonowski M. Cislunar Space Situational Awareness Architecture Design and Analysis[D]. University of Colorado, 2025.
[3] Zimovan E M. Characteristics and design strategies for near rectilinear halo orbits within the Earth-moon system[D]. Purdue University, 2017.
[4] 张仁勇. 深空探测小推力低能转移轨道设计方法研究[D]. 西安: 西北工业大学, 2015.
[5] 徐明. 基于平动点理论的航天器轨道动力学与控制研究[D]. 北京: 北京航空航天大学, 2008.
[6] 侯锡云. 平动点的动力学特征及其应用[D]. 南京: 南京大学, 2008.